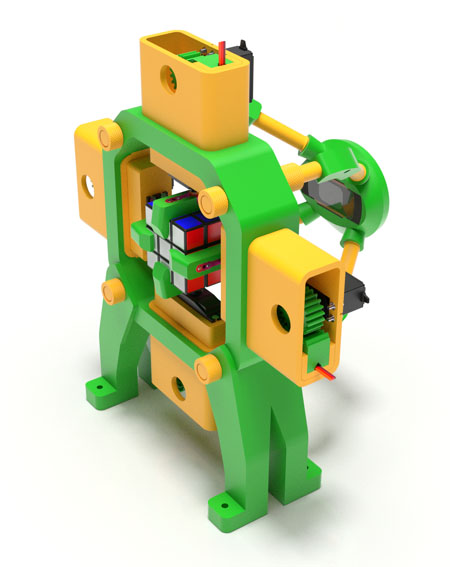
3D Model 12: 3D-Printable Rubiks's Cube Solving Robot
Introduction
Our Rubik's Cube Solving Robot now has a dedicated web site at www.rcr3d.com. Click on the image below to go there.
Help keep this site free.